


Authors:
(1) Mohammad Shushtari, Department of Mechanical and Mechatronics Engineering, University of Waterloo ([email protected]);
(2) Julia Foellmer, Mechanics and Ocean Engineering Department, Hamburg University of Technology ([email protected]);
(3) Sanjay Krishna Gouda, Department of Mechanical and Mechatronics Engineering, University of Waterloo and Toronto Rehabilitation Institute (KITE), University Health Network ([email protected]).
Table of Links
Abstract and 1 Introduction
2 Results
2.1 Initial Processed Data for a Representative Participant
2.2 Overall Performance Analysis
2.3 Interaction Portrait Analysis
2.4 Individual Adaptation Strategy
3 Discussion
3.1 Human Adaptation
3.2 Importance of IP Analysis
4 Conclusion
5 Methods
5.1 Feedforward Control Strategies
5.2 Experimental Setup
5.3 Experimental Protocol
5.4 Data Analysis
Declarations
Appendix A Complementary Example Data
Appendix B Comparison with Natural Walking
References
Declarations
• Funding
NSERC Discovery under Grant RGPIN-2018-4850, the Tri-Agency Institutional Programs Secretariat (TIPS): New Frontiers in Research Fund (NFRF)–Exploration under Grants 2018-1698, 2022-620, John R. Evans Leaders Fund Canadian Foundation for Innovation, Ontario Research Fund (ORF).
• Conflict of interest/Competing interests
No competing or conflict of interests.
• Code availability
Contact A.A. for code and other materials.
• Author contribution
M.S. and A.A. designed the experiment. M.S. designed the AMTC and TBC controllers and implemented them on the Indego exoskeleton along with the HTC controller. M.S. and J.F. performed the experiment. M.S. analyzed and visualized the data. M.S. and A.A. interpreted the results and prepared the manuscript. All authors provided critical feedback on the manuscript.
Appendix A Complementary Example Data




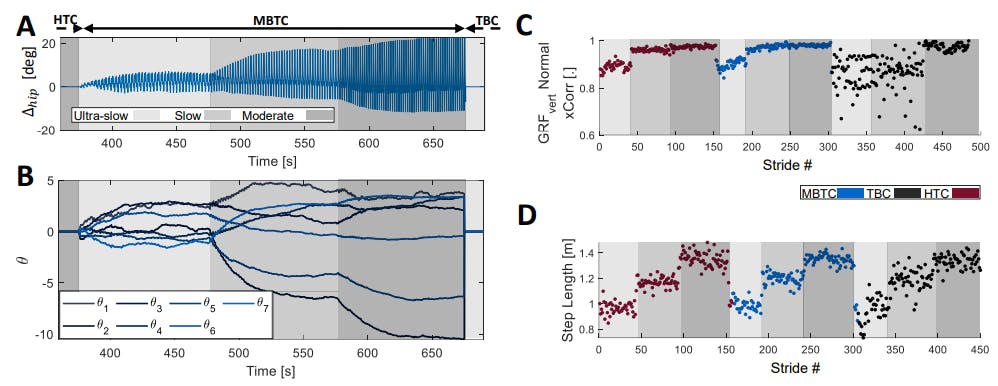
Fig. A1A illustrates the modifications made to the hip reference trajectory (∆rhip) during the MBTC block. These modifications occur after the HTC block and before the TBC block, as depicted in (Fig. 10), across ultra-slow, slow, and moderate walking speeds. Similarly, Fig. A1B showcases the adaptation of the Fourier coefficients (θ) and their convergence pattern during the MBTC block at ultra-slow walking. The Fourier coefficients begin to adapt as soon as that block starts. It takes approximately 20 seconds for them to converge, and they subsequently exhibit minor oscillations around their converged values until the treadmill speed is switched to the slow speed. This change in treadmill speed induces new walking conditions, resulting in distinct gait patterns. Consequently, the Fourier coefficients converge toward a new set of steadystate values. A similar pattern emerges when the treadmill is switched to the moderate speed. Pearson correlation between the vertical Ground Reaction Forces during each of the HTC, MBTC, and TBC blocks and natural walking with no exoskeleton is plotted for each stride in Fig. A1C. According to the graph, the GRF patterns resemble the GRF in natural walking at slow and moderate walking speeds. In ultra-slow speed, however, the correlation slightly decreases in all three blocks. Finally, Fig. A1D shows the computed stride length. As expected, in all three blocks, the stride length increases with the increase in treadmill speed.
Appendix B Comparison with Natural Walking
To identify which controller led to a gait closer to natural walking, we analyzed the spatiotemporal parameters of gait (obtained using GaitUp Sensors) in TBC, HTC, and AMTC and compared them to those of each participant’s natural walking with no exoskeleton. Moreover, we analyzed the correlation of recorded ground reaction torques in the case of each controller with natural walking.
B.1 Gait Spatiotemporal Parameters



Fig. B2A shows the maximum heel clearance in natural walking condition (with no exoskeleton) and during exoskeleton walking at each of the TBC, HTC, and AMTC blocks at ultra-slow, slow, and moderate speeds. Natural walking has the greatest heel clearance, which is expected as the addition of the exoskeleton weight makes it harder for the participant to lift their foot to their convenient level. Among the three controllers, AMTC has a heel clearance closer to that of natural walking, indicating that maintaining the desired heel clearance is easier for the participant in the case of this controller. Similarly, Fig. B2B compares the minimum toe clearance, showing that at all walking speeds, natural walking with no exoskeleton has the lowest minimum toe clearance. The HTC controller demonstrates lower toe clearance than the TBC and AMTC at all speeds. However, these differences are not statistically significant unless during moderate walking, where the HTC has led to a 21.3%±18.2 and 12.2%±9.3 decrease in minimum toe clearance compared to the AMTC and TBC, respectively (Friedman: p <0.001, Wilcoxon signed rank: pHT C,AMT C <0.007, pHT C,T BC <0.003).
Regarding the stance percentage, as depicted in Fig. B2C, AMTC exhibits the closest behavior to natural walking at all speeds. In all cases, TBC has a smaller stance percentage compared to natural walking. During ultra-slow and slow-speed walking, HTC has the smallest stance percentage. In moderate-speed walking, however, HTC has the highest stance percentage. Finally, Fig. B2D illustrates the stride length for each of the controllers at the three experimented walking speeds. The stride length generally increases with the increase in treadmill speed. At each individual speed, however, natural walking appears to have the smallest stride length on average, mostly compared to the TBC, which has the highest stride length (Friedman: p <0.05, Wilcoxon signed rank: p <0.01 for all speeds).
B.2 Ground Reaction Force



Fig. B3A shows the Pearson correlation of the vertical ground reaction force between walking with each of the controllers and natural walking without the exoskeleton. At all speeds, TBC exhibits the most different vertical GRF compared to the other controllers (Friedman: pUltra-slow <0.02, pSlow < 0.001, and pModerate < 0.016; Wilcoxon signed rank: p <0.01 for all speeds). In contrast to the TBC, HTC and AMTC led to more natural vertical GRF profiles with Pearson correlations greater than 96% at all speeds. The same observation stands for the GRFs in lateral (Fig. B3B) and longitudinal (Fig. B3C) directions, where TBC shows the least natural GRF profile while HTC and AMTC demonstrate closer to natural walking GRF with Pearson correlations greater than 82.2% and 91.5% in lateral and longitudinal directions, respectively (Friedman: p <0.003; Wilcoxon signed rank: p <0.004 for all cases).
References
[1] Dupont, P.E., Nelson, B.J., Goldfarb, M., Hannaford, B., Menciassi, A., O’Malley, M.K., Simaan, N., Valdastri, P., Yang, G.-Z.: A decade retrospective of medical robotics research from 2010 to 2020. Science Robotics 6 (2021)
[2] Duschau-Wicke, A., Zitzewitz, J.V., Caprez, A., Lunenburger, L., Riener, R.: Path control: a method for patient-cooperative robot-aided gait rehabilitation. IEEE Transactions on Neural Systems and Rehabilitation Engineering 18, 38–48 (2009)
[3] Bryan, G.M., Franks, P.W., Song, S., Reyes, R., O’Donovan, M.P., Gregorczyk, K.N., Collins, S.H.: Optimized hip-knee-ankle exoskeleton assistance reduces the metabolic cost of walking with worn loads. Journal of Neuroengineering and Rehabilitation 18, 1–13 (2021)
[4] Franks, P.W., Bryan, G.M., Martin, R.M., Reyes, R., Lakmazaheri, A.C., Collins, S.H.: Comparing optimized exoskeleton assistance of the hip, knee, and ankle in single and multi-joint configurations. Wearable Technologies 2, 16 (2021)
[5] Durandau, G., Rampeltshammer, W.F., Kooij, H., Sartori, M.: Neuromechanical model-based adaptive control of bilateral ankle exoskeletons: biological joint torque and electromyogram reduction across walking conditions. IEEE Transactions on Robotics 38, 1380–1394 (2022)
[6] Poggensee, K.L., Collins, S.H.: How adaptation, training, and customization contribute to benefits from exoskeleton assistance. Science Robotics 6 (2021)
[7] Nuckols, R.W., Lee, S., Swaminathan, K., Orzel, D., Howe, R.D., Walsh, C.J.: Individualization of exosuit assistance based on measured muscle dynamics during versatile walking. Science robotics 6 (2021)
[8] Lee, U.H., Shetty, V.S., Franks, P.W., Tan, J., Evangelopoulos, G., Ha, S., Rouse, E.J.: User preference optimization for control of ankle exoskeletons using sample efficient active learning. Science Robotics 8 (2023)
[9] Postol, N., Lamond, S., Galloway, M., Palazzi, K., Bivard, A., Spratt, N.J., Marquez, J.: The metabolic cost of exercising with a robotic exoskeleton: A comparison of healthy and neurologically impaired people. IEEE Transactions on Neural Systems and Rehabilitation Engineering 28, 3031–3039 (2020)
[10] Witte, K.A., Fiers, P., Sheets-Singer, A.L., Collins, S.H.: Improving the energy economy of human running with powered and unpowered ankle exoskeleton assistance. Science Robotics 5 (2020)
[11] Zhu, F., Kern, M., Fowkes, E., Afzal, T., Contreras-Vidal, J.-L., Francisco, G.E.,Chang, S.-H.: Effects of an exoskeleton-assisted gait training on post-stroke lowerlimb muscle coordination. Journal of Neural Engineering 18, 046039 (2021)
[12] Ku¸cuktabak, E.B., Wen, Y., Kim, S.J., Short, M., Ludvig, D., Hargrove, L., Perreault, E., Lynch, K., Pons, J.: Haptic transparency and interaction force control for a lower-limb exoskeleton. IEEE Transactions on Robotics (2024)
[13] Eva, M.M., Grizzle, J.W.: Feedback control design for robust comfortable sit-tostand motions of 3d lower-limb exoskeletons. IEEE Access 9, 122–161 (2020)
[14] Masengo, G., Zhang, X., Dong, R., , A.B.A., Hamza, K., Mudaheranwa, E.: Lower limb exoskeleton robot and its cooperative control: A review, trends, and challenges for future research. Frontiers in Neurorobotics 16, 1–25 (2023)
[15] Ingraham, K.A., Remy, C.D., Rouse, E.J.: The role of user preference in the customized control of robotic exoskeletons. Science robotics 7 (2022)
[16] Pinto-Fernandez, D., Diego, T., Carmen Sanchez-Villamanan, M., Aller, F., Mombaur, K., Conti, R., Vitiello, N., Moreno, J.C., Pons, J.L.: Performance evaluation of lower limb exoskeletons: A systematic review. IEEE Transactions on Neural Systems and Rehabilitation Engineering 28, 1573–1583 (2020)
[17] Slade, P., Kochenderfer, M.J., Delp, S.L., Collins, S.H.: Personalizing exoskeleton assistance while walking in the real world. Nature 610, 277–282 (2022)
[18] Medina, J.R., Lorenz, T., Hirche, S.: Synthesizing anticipatory haptic assistance considering human behavior uncertainty. IEEE Transactions on Robotics 31, 180– 190 (2015)
[19] Martinez, A., Lawson, B., Durrough, C., Goldfarb, M.: A velocity-field-based controller for assisting leg movement during walking with a bilateral hip and knee lower limb exoskeleton. IEEE Transactions on Robotics 35, 307–316 (2018)
[20] Shushtari, M., Nasiri, R., Arami, A.: Online reference trajectory adaptation: A personalized control strategy for lower limb exoskeletons. IEEE Robotics and Automation Letters 7, 128–134 (2021)
[21] Asl, H.J., Yamashita, M., Narikiyo, T., Kawanishi, M.: Field-based assist-asneeded control schemes for rehabilitation robots. IEEE/ASME Transactions on Mechatronics 25, 2100–2111 (2020)
[22] Dominijanni, G., Pinheiro, D.L., Pollina, L., Orset, B., Gini, M., Anselmino, E., Pierella, C., Olivier, J., Shokur, S., Micera, S.: Human motor augmentation with an extra robotic arm without functional interference. Science Robotics 8 (2023)
[23] Losey, D.P., Mcdonald, C.G., Battaglia, E., O’Malley, M.: A review of intent detection, arbitration, and communication aspects of shared control for physical human-robot interaction. Applied Mechanics Reviews 70 (2018) https://doi.org/ 10.1115/1.4039145
[24] Jackson, R.W., Collins, S.H.: Heuristic-based ankle exoskeleton control for coadaptive assistance of human locomotion. IEEE Transactions on Neural Systems and Rehabilitation Engineering 27, 2059–2069 (2019)
[25] Banala, S.K., Agrawal, S.K., Scholz, J.P.: Active leg exoskeleton (alex) for gait rehabilitation of motor-impaired patients. In: 2007 IEEE 10th International Conference on Rehabilitation Robotics, pp. 401–407 (2007). 2007 IEEE 10th International Conference on Rehabilitation Robotics
[26] Dinovitzer, H., Shushtari, M., Arami, A.: Feedforward control of lower limb exoskeletons: which torque profile should we use? IEEE Robotics and Automation Letters (2023)
[27] Dinovitzer, H., Shushtari, M., Arami, A.: Accurate real-time joint torque estimation for dynamic prediction of human locomotion. IEEE Transactions on Biomedical Engineering 70, 2289–2297 (2023)
[28] Shushtari, M., Dinovitzer, H., Weng, J., Arami, A.: Ultra-robust estimation of gait phase. IEEE Transactions on Neural Systems and Rehabilitation Engineering 30, 2793–2801 (2022)
[29] Shushtari, M., Arami, A.: Human–exoskeleton interaction force estimation in indego exoskeleton. Robotics 12, 66 (2023)
[30] Carroll, K., Kennedy, R., Koutoulas, V., Bui, M., Kraan, C.: Validation of shoeworn gait up physilog® 5 wearable inertial sensors in adolescents. Gait & Posture 91, 19–25 (2022)
[31] Schwameder, H., Andress, M., Graf, E., Strutzenberger, G.: Validation of an imu-system (gait-up) to identify gait parameters in normal and induced limping walking conditions. In: ISBS-conference Proceedings Archive (2015)
[32] Pedotti, A., Krishnan, V.V., Stark, L.: Optimization of muscle-force sequencing in human locomotion. Mathematical Biosciences 38, 57–76 (1978)
[33] Crowninshield, R.D., Brand, R.A.: A physiologically based criterion of muscle force prediction in locomotion. Journal of Biomechanics 14, 793–801 (1981)
[34] Lieber, R.L., Roberts, T.J., Blemker, S.S., Lee, S.S.M., Herzog, W.: Skeletal muscle mechanics, energetics and plasticity. Journal of Neuroengineering and Rehabilitation 14, 1–16 (2017)


{kind=link}