Authors:
(1) Rafael Kuffner dos Anjos;
(2) Joao Madeiras Pereira.
Table of Links
Abstract and 1 Introduction
2 Related Work and 2.1 Virtual avatars
2.2 Point cloud visualization
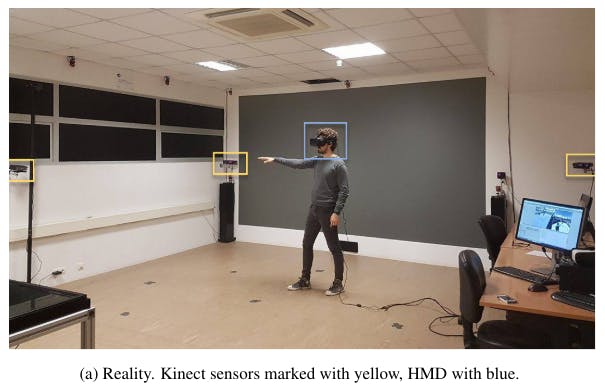
3 Test Design and 3.1 Setup
3.2 User Representations
3.3 Methodology
3.4 Virtual Environment and 3.5 Tasks Description
3.6 Questionnaires and 3.7 Participants
4 Results and Discussion, and 4.1 User preferences
4.2 Task performance
4.3 Discussion
5 Conclusions and References
ABSTRACT
Virtual Reality(VR) has recently gained traction with many new and ever more affordable devices being released. The increase in popularity of this paradigm of interaction has given birth to new applications and has attracted casual consumers to experience VR. Providing a self-embodied representation (avatar) of users’ full bodies inside shared virtual spaces can improve the VR experience and make it more engaging to both new and experienced users . This is especially important in fully immersive systems, where the equipment completely occludes the real world making self awareness problematic. Indeed, the feeling of presence of the user is highly influenced by their virtual representations, even though small flaws could lead to uncanny valley side-effects. Following previous research, we would like to assess whether using a third-person perspective could also benefit the VR experience, via an improved spatial awareness of the user’s virtual surroundings. In this paper we investigate realism and perspective of self-embodied representation in VR setups in natural tasks, such as walking and avoiding obstacles. We compare both First and Third-Person perspectives with three different levels of realism in avatar representation. These range from a stylized abstract avatar, to a “realistic” mesh-based humanoid representation and a point-cloud rendering. The latter uses data captured via depth-sensors and mapped into a virtual self inside the Virtual Environment. We present a throughout evaluation and comparison of these different representations, describing a series of guidelines for self-embodied VR applications. The effects of the uncanny valley are also discussed in the context of navigation and reflex-based tasks.
1 INTRODUCTION
The use of Virtual Reality (VR) systems can improve efficiency on many tasks in different areas of expertise such as engineering, medicine and architecture. But a common problem in these setups is the need to use optical tracking systems to locate objects in the 3d shared space. This is even more problematic to track the fullbody of a user, needing them to wear reflexive rigid body markers for each of its joints for correct representation inside the environment. The use of Kinect Sensors overcame this problem by providing non-intrusive full-body skeleton tracking and can also extract their image and map it to its virtual self.
When using a Head-Mounted Display system, the real-self of the user is completely occluded, which diminishes the sense of presence in this shared virtual space. The use of a self-embodied representation (avatar) is one approach to overcome this issue [32]. The use of an avatar gives a reference of recognizable size and a connectedness to the virtual environment [13, 26, 25], even though may still cause distance underestimation [24]. An important aspect of measuring the effectiveness of a VR experience is the sense of embodiment. This concept is constitutive of the sense of presence in VR and affects the way one interacts with virtual elements [16]. The sense of embodiment of an avatar is subdivided in three components: the sense of agency, i.e. feeling of motor control over the virtual body; (ii) the sense of body ownership, i.e. feeling that the virtual body is one’s own body; and (iii) self-location, i.e. the experienced location of the self.
Some aspects are known to influence the sense of embodiment of the avatar, namely the realism of the representation and the perspective which is viewed. Regarding realism in avatars, a known problem is the uncanny valley [21], which also affects embodied representations [19, 20]. Changing the perspective which the avatar is viewed could also positively contribute to the VR experience [7, 9] without compromising user’s sense of embodiment. Normally, the user is viewed in its own perspective (known as First-Person Perspective). Another possibility is the use of Third-Person perspective (3PP) where the virtual camera is positioned behind the user, allowing them to view its own full-virtual body. This type of representation is widely used in games for improving spatial awareness in conventional displays.
In this paper we further study the influence of perspective (1PP and 3PP) and realism of the representation of self-embodied avatars in the sense of embodiment of users in Virtual Reality setups. For that, we use three different representations following the known Uncanny Valley effect [21] varying the level of realism of each representation, from an abstract to a realistic humanoid representation. The first is an abstract representation that uses spheres and cylinders to represent parts of the body. The second is a realistic mesh avatar that is deformed according to the tracking information. The third representation is a low cost point-cloud based avatar, which extracts information from one’s real-self and maps it into the virtual environment. For comparing sense of embodiment, efficiency and easiness of use of each of the representations we designed and evaluated four different natural tasks based on previous work [28]. The First three tasks were navigation tasks, where users needed to walk while avoiding obstacles in the Virtual Environment. In the latter, users needed to use their reflexes to catch objects thrown in in their direction. In the following sections we present the related work on user-representation, describe the test measures, the results obtained and propose a set of guidelines for Self-Embodied Virtual Reality applications.







{kind=link}