
Authors:
(1) Liqiang Zhang, School of Microelectronics, Tianjin University Tianjin, China;
(2) Kai Guo, School of Microelectronics, Tianjin University Tianjin, China;
(3) Yu Liu, School of Microelectronics, Tianjin University Tianjin, China.
Table of Links
Abstract and I. Introduction
II. Methodology
III. Experimental Results
IV. Conclusion and Future Works, and References
Abstract—Kalman filter-based Inertial Navigation System (INS) is a reliable and efficient method to estimate the position of a pedestrian indoors. Classical INS-based methodology which is called IEZ (INS-EKF-ZUPT) makes use of an Extended Kalman Filter (EKF), a Zero velocity UPdaTing (ZUPT) to calculate the position and attitude of a person. However, heading error which is a key factor of the whole Pedestrian Dead Reckoning (PDR) system is unobservable for IEZ-based PDR system. To minimize the error, Electronic Compass (EC) algorithm becomes a valid method. But magnetic disturbance may have a big negative effect on it. In this paper, the Quasi-static Magnetic field Detection (QMD) method is proposed to detect the pure magnetic field and then selects EC algorithm or Heuristic heading Drift Reduction algorithm (HDR) according to the detection result, which implements the complementation of the two methods. Meanwhile, the QMD, EC, and HDR algorithms are integrated into IEZ framework to form a new PDR solution which is named as Advanced IEZ (AIEZ).
I. INTRODUCTION
Global Navigation Satellite System (GNSS) is widely used as an essential positioning method for pedestrian navigation. But in the field, such as urban canyon or indoor environment, GNSS becomes unreliable due to the signal attenuation, interference and shade. In order to get continuous and reliable positioning results, Local Positioning System (LPS) is being investigated by using various types of methods, such as inertial measurement unit (IMU) based, wireless-based or vision-based technology [1], etc. Among them, IMUsbased PDR methods are preferred due to lower cost, higher reliability, as well as no external infrastructure needed.
Different mounting positions were researched including handheld [2], belt-mounted [3] or foot-mounted [4-8], etc. Unfortunately, low-cost IMU provides shortterm stability and the systematic errors increase due to its integration nature. In order to improve the performance of the system, a widely used Kalman-based PDR framework IEZ [4] utilized ZUPT algorithm to estimate velocity errors during stance phase. We also suggested a new stance phase detection algorithm which is named as Dual ZUPT (D-ZUPT) in order to improve the performance of PDR system [8].
For the performance of PDR system, heading is one of the most essential factors which has an impact on its accuracy. However, the heading error is unobservable for IEZ. Utilizing magnetic heading is an effective way to bound the heading drift error. But magnetic disturbances including soft and hard disturbance [9, 10] are stochastic and changing indoors, which are impossible to be predicted. Hence, the Quasi-static Magnetic field Detection (QMD) algorithm was proposed to select pure magnetic field in magnetic disturbance environment and then fuse the data from gyroscope and magnetometer [11]. The method is available to detect magnetic field which is changing slightly and has a good performance. However, it is difficult to recognize the hard magnetic disturbance. There is no denying that it is still an efficient method to improve the heading accuracy of PDR system.
In this paper, QMD algorithm was redesigned in order to solve the problem that the hard magnetic disturbance is difficult to be detected for the classical QMD algorithm in [11]. When the disturbances are detected by QMD, HDR algorithm which only rely on the data from gyroscope is selected to reduce the heading drift error. On the contrary, Electronic Compass (EC) algorithm is a better option to modify the heading error. Referring to [4], following Foxlin’s work, to derive a new PDR system, QMD, HDR and EC algorithm are integrated into IEZ to form a novel framework named AIEZ (Advanced IEZ).
II. METHDOLOGY
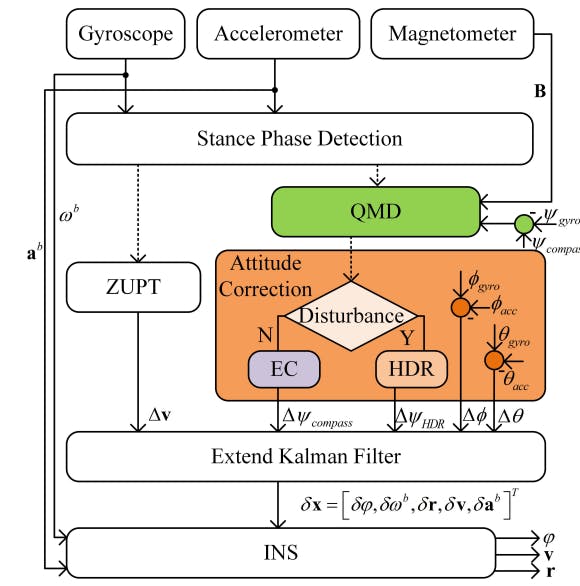
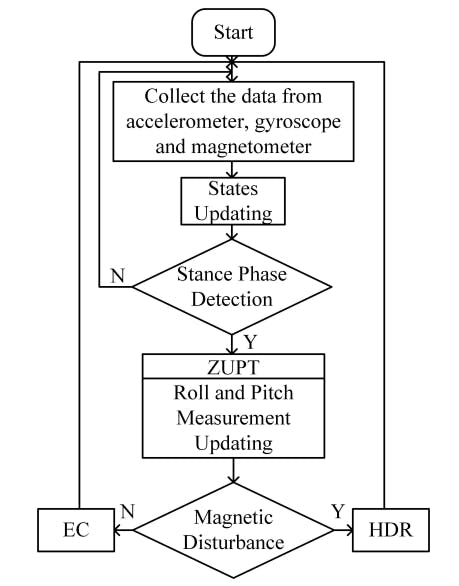
This section describes the mechanism of the PDR framework AIEZ. The processing steps are shown as follows. The block diagram of AIEZ is shown in Fig.1 as well as the flow chart in Fig.2.
-
The data collected from accelerometer and gyroscope are utilized to detect the stance phase.
-
The roll and pitch angle are estimated using the data from accelerometer during the stance phase.
-
Meanwhile, when the pure magnetic field is detected by QMD, EC is selected to calculate the optimal heading. On the contrary, HDR is the better option to correct the heading drift error.
-
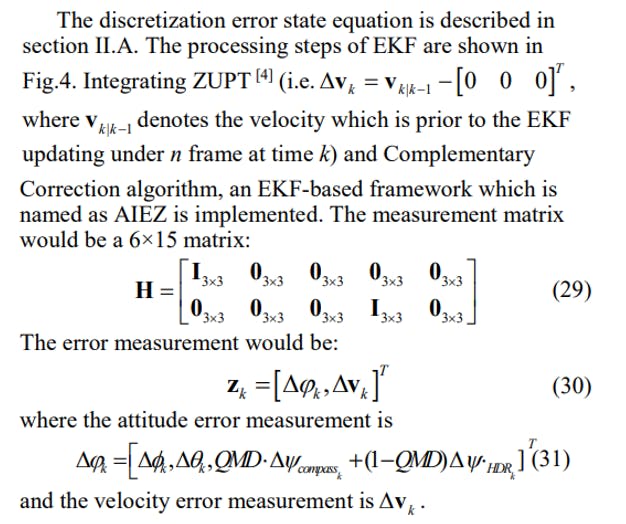
The Extended Kalman Filter (EKF) is updated with velocity and attitude measurement by ZUPT and Attitude Correction (AC) during stance phase, respectively.
-
Eventually, we obtain the optimal attitude, velocity and position using inertial navigation mechanism.


A. Shoe-mounted Inertial Navigation System
We use standard strap-down Inertial Navigation System (INS) to calculate pedestrian’s attitude, velocity and position. The IMU named MTw Awinda with the size of 148×104×31.9 mm from Xsens Company is configured to send data at 100 Hz, which is mounted on the heel as shown in Fig.3.






B. Stance Phase Detection Algorithm
Stance phase detection is a key process in the PDR framework AIEZ. Better recognition of stance phase contribute to trigger the EKF timely to modify the INS errors for a better performance. Most algorithms for stance phase detection rely on the data from accelerometer [12] or gyroscope [13] as well as both accelerometer and gyroscope [6, 14]. Some scholar implemented the detection using ultrasound, RFID or magnet [15], etc. We utilize the stance hypothesis optimal detection detector (SHOE) proposed in [14] to detect the stance phase.
C. Quasi-static Magnetic field Detection Algorithm
We formalize the quasi-static magnetic field detection problem as a binary hypothesis testing problem, where the detector can choose between the two hypotheses which are defined as follows:


Referring to [14], the sensor output model is established as:





D. Complementary Correction Algorithm
Due to the influence of the biases of accelerometer and gyroscope, the errors of Euler angle accumulate over time. Using the data from accelerometer and gyroscope can calculate the absolute roll and pitch angle when the foot is stationary. Pure magnetic field contributes to a true heading. We use the data during stance phase to modify the attitude calculated by INS.

2) Electronics Compass


3) Heuristic heading Drift Reduction


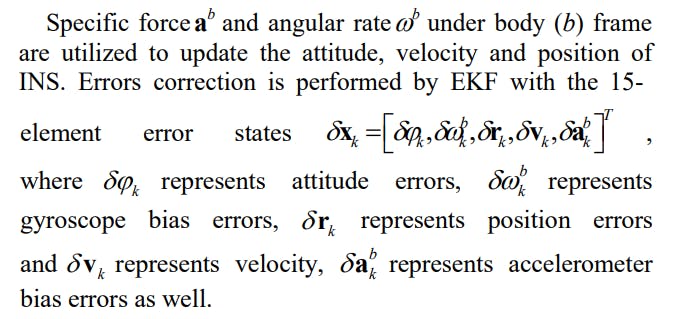
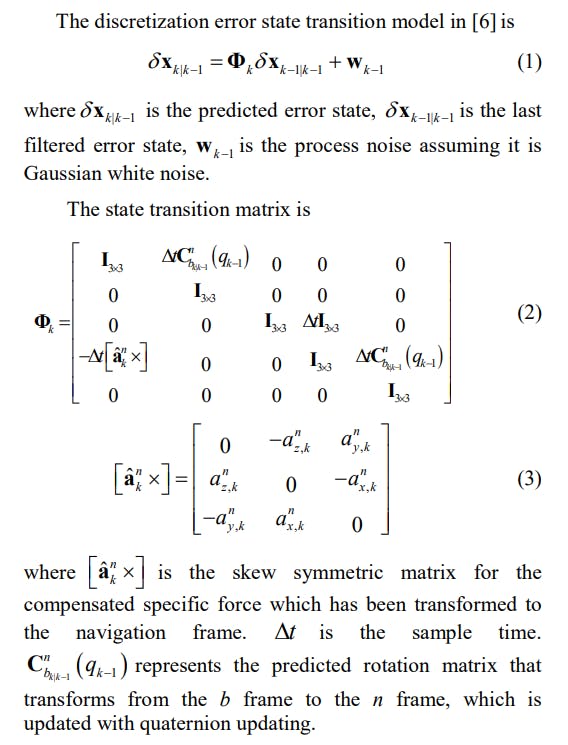
E. Extend Kalman Filter



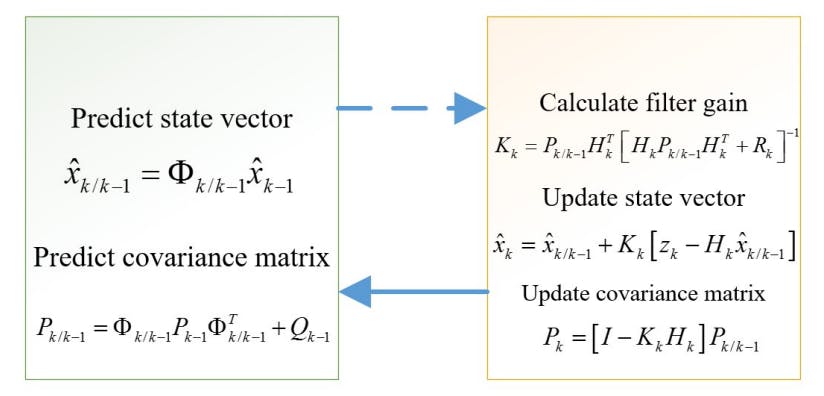
This paper is







{kind=link}