
:::info
Authors:
(1) Ivar Bjørgo Saksvik, Department of Mechanical, Electronic and Chemical Engineering Oslo Metropolitan University, Oslo, Norway ([email protected]);
(2) Alex Alcoce,r Department of Mechanical, Electronic and Chemical Engineering Oslo Metropolitan University, Oslo, Norway ([email protected]);
(3) Vahid Hassani, Department of Mechanical, Electronic and Chemical Engineering Oslo Metropolitan University, Oslo, Norway ([email protected]).
:::
Table of Links
Abstract and I. Introduction
II. Dead-Reckoning Navigation
III. Neural Network Aided Dead-Reckoning Navigation
IV. AUV Platforms and Datasets
V. Experimental and Simulation Results
VI. Conclusions and Further Work
VII. Acknowledgments and References
Abstract—This paper presents a deep learning approach to aid dead-reckoning (DR) navigation using a limited sensor suite. A Recurrent Neural Network (RNN) was developed to predict the relative horizontal velocities of an Autonomous Underwater Vehicle (AUV) using data from an IMU, pressure sensor, and control inputs. The RNN network is trained using experimental data, where a doppler velocity logger (DVL) provided ground truth velocities. The predictions of the relative velocities were implemented in a dead-reckoning algorithm to approximate north and east positions. The studies in this paper were twofold I) Experimental data from a Long-Range AUV was investigated. Datasets from a series of surveys in Monterey Bay, California (U.S) were used to train and test the RNN network. II) The second study explore datasets generated by a simulated autonomous underwater glider. Environmental variables e.g ocean currents were implemented in the simulation to reflect real ocean conditions. The proposed neural network approach to DR navigation was compared to the on-board navigation system and ground truth simulated positions
I. INTRODUCTION
AUTONOMOUS UNDERWATER VEHICLES (AUVS) have in the last decades become important tools in ocean research. Untethered from umbilical cables, these vehicles are suitable for a high variety of applications including bathymetric mapping, water sampling and environmental monitoring. A notorious challenge for AUVs is to navigate and georeference acquired sensor data during operations as GPS signals can’t propagate trough water. Conventional solutions to this issue involve adding acoustic navigational or/and positioning instruments to the AUV payload. Due to the good propagation of sound in water, doppler velocity loggers and acoustic baseline systems are considered the backbone in AUV navigation and underwater positioning [10], [25]. However, these traditional sensors are often expensive and consumes large amounts of power. In AUV fleets, the cost of adding acoustic instruments is compounded with the number of vehicles. In this paper we consider a limited sensor suite consisting of an IMU sensor and a pressure transducer, where acoustic instruments are partially available to collect experimental training data. Collected DVL velocity measurements from only a few missions are used as a reference in supervised neural network training. The aim for the trained network is to complement DR navigation when the DVL sensor is inaccessible, for example in AUV fleets with budget limitations.
The absence of acoustic navigational and positioning instruments has traditionally been compensated by modelbased observers like Extended Kalman Filters (EKFs). These are derived from AUV dynamics to form an estimation model [8], [9], [21], [22]. Unfortunately, model-based observers rely on parameters that are difficult to obtain in practice. The dynamics of an AUV is derived based on intricate hydrodynamic models. Experiments must be carried out in a towing-tank facility or using expensive CFD (Computational Fluid Dynamics) software to obtain hydrodynamic damping coefficients [28], [3]. If the external geometry of the AUV changes, i.e. when making small modifications to payload sections, the coefficients need to be updated.
To avoid deriving complex AUV models and conducting time consuming towing-tank or CFD experiments, this paper presents a data-driven approach to dead-reckoning navigation. Using experimental data from AUV missions and simulations, a neural network is trained to learn and generalize relative AUV motions. Data-driven neural network regression abolishes the need for knowledge of a dynamic model, and avoids modelling and estimation errors related to classical state observers [4], [5]. A recurrent neural network (RNN) is developed to relax time-delayed effects in the AUV dynamics which occurs due to vehicle inertia, under actuation and added mass effects [1], [6]. With an input layer composed of standard sensory measurements (pressure sensor, inertial measurement unit) and control actions, the RNN network aims to predict relative surge ur and sway vr velocities. These are further implemented in a dead-reckoning algorithm to approximate North and East positions during operations.
A. Related Work
An estimation for marine crafts. In Zhang et al. [4] a Short-Term Long-Term-Memory (LSTM) recurrent neural network is proposed to estimate the relative position of an AUV. The LSTM network used data from a pressure sensor, an inertial measurement unit (IMU), and an acoustic doppler velocity logger (DVL) to predict the horizontal north and east positions. Training and validation data were collected from a series of surface trajectories while logging GPS locations, which were projected as ground truth measurements. A similar study with the same AUV is presented in Mu et al. [5], where a bi-directional LSTM network was used. A neural network approach to dead-reckoning navigation of dynamically positioned ships is presented in Skulestad et al. [6]. Control actions and commands from vessel thrusters combined with heading measurements was used as input data in a RNN network to aid navigation during GNSS outages. Experiments were conducted in a vessel simulator with time-varying environmental disturbances such as wind forces, sea waves and ocean currents. In Chen et al. [13] a neural network is presented to assist navigation during DVL malfunction. A nonlinear autoregressive network with exogenous SINS (Strapdown Inertial Navigation System) inputs was used. The network was tested and validated on a ship with a DVL mounted on the vessel hull to provide training and validation data.
The remaining parts of this paper are detailing the following segments – Section II and III addresses the concept of dead-reckoning navigation and the neural network velocity observer respectively. Section IV presents the AUV platforms and datasets used to train and test the neural networks. The results are detailed in section V and the conclusion and recommendations for further work are presented in VI.
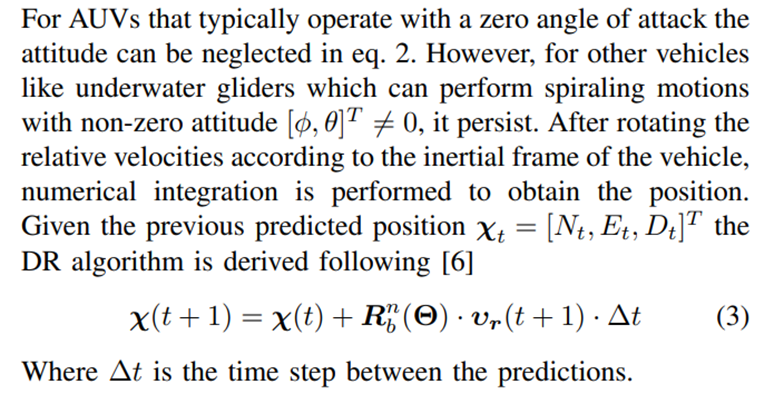
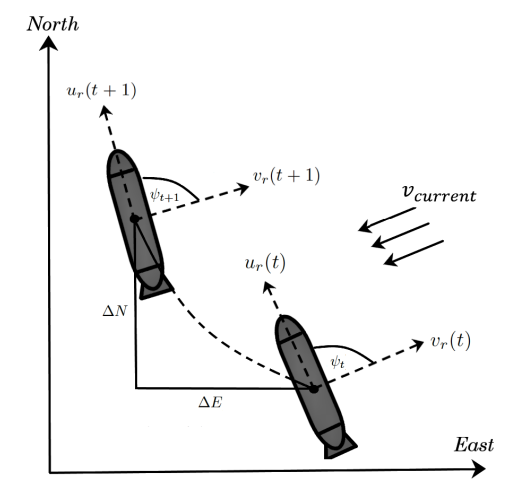
II. DEAD-RECKONING NAVIGATION
:::info
This paper is available on arxiv under CC BY 4.0 DEED license.
:::






{kind=link}