Authors:
(1) Zhaoqing Wang, The University of Sydney and AI2Robotics;
(2) Xiaobo Xia, The University of Sydney;
(3) Ziye Chen, The University of Melbourne;
(4) Xiao He, AI2Robotics;
(5) Yandong Guo, AI2Robotics;
(6) Mingming Gong, The University of Melbourne and Mohamed bin Zayed University of Artificial Intelligence;
(7) Tongliang Liu, The University of Sydney.
Table of Links
Abstract and 1. Introduction
2. Related works
3. Method and 3.1. Problem definition
3.2. Baseline and 3.3. Uni-OVSeg framework
4. Experiments
4.1. Implementation details
4.2. Main results
4.3. Ablation study
5. Conclusion
6. Broader impacts and References
A. Framework details
B. Promptable segmentation
C. Visualisation
B. Promptable segmentation.
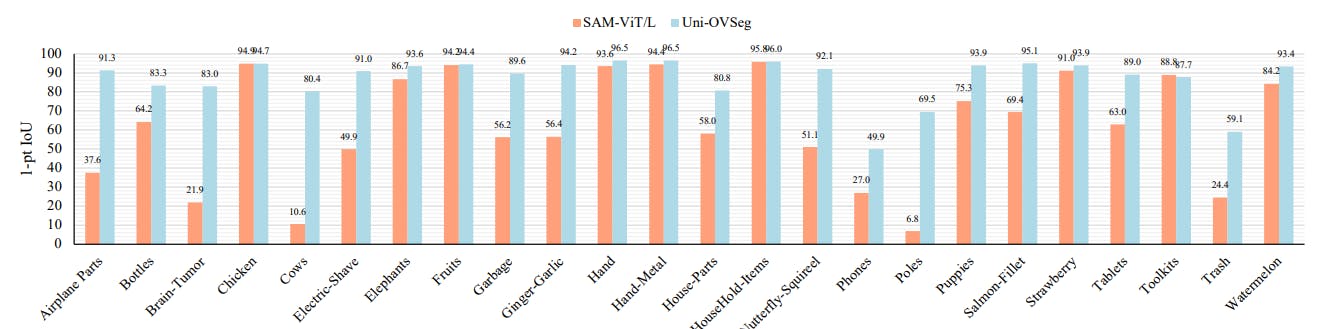
Evaluation details. We perform a prompt segmentation evaluation on a wide range of datasets in various domains. For the point prompt, we adopt a uniform point grid h×w as input prompts (e.g., 20 × 20). For the box prompt, we use ground-truth bounding boxes as input prompts. 1-pt IoU denotes the oracle performance of one point by evaluating the intersection-overunion (IoU) of the predicted masks that best match ground truth. 1-box IoU denotes is similar to 1-pt IoU. More evaluation results are reported in Fig. 7, Fig. 8 and Fig. 9.
Dataset details. A description of each dataset is given in Tab. 5. The iShape dataset has 6 subsets, including antenna, branch, fence, hanger, log and wire.

/cdn.vox-cdn.com/uploads/chorus_asset/file/23951355/STK043_VRG_Illo_N_Barclay_1_Meta.jpg)




{kind=link}