Authors:
(1) Mohammad Shushtari, Department of Mechanical and Mechatronics Engineering, University of Waterloo ([email protected]);
(2) Julia Foellmer, Mechanics and Ocean Engineering Department, Hamburg University of Technology ([email protected]);
(3) Sanjay Krishna Gouda, Department of Mechanical and Mechatronics Engineering, University of Waterloo and Toronto Rehabilitation Institute (KITE), University Health Network ([email protected]).
Table of Links
Abstract and 1 Introduction
2 Results
2.1 Initial Processed Data for a Representative Participant
2.2 Overall Performance Analysis
2.3 Interaction Portrait Analysis
2.4 Individual Adaptation Strategy
3 Discussion
3.1 Human Adaptation
3.2 Importance of IP Analysis
4 Conclusion
5 Methods
5.1 Feedforward Control Strategies
5.2 Experimental Setup
5.3 Experimental Protocol
5.4 Data Analysis
Declarations
Appendix A Complementary Example Data
Appendix B Comparison with Natural Walking
References
2.1 Initial Processed Data for a Representative Participant






2.2 Overall Performance Analysis
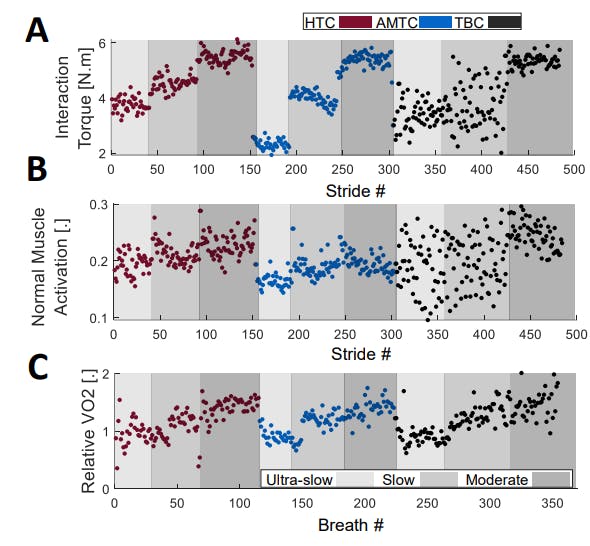
Fig. 3A shows the sum of the oxygen uptake for participants for each of the TBC, HTC, and AMTC blocks during ultra-slow, slow, and moderate-speed walking. TBC and AMTC have the highest and lowest metabolic rate at all walking speeds, respectively. The AMTC-resultant metabolic rate is significantly less than other controllers, at ultra-slow and slow walking, where AMTC resulted in 22.9%±17.1 (Friedman: p <0.03, Wilcoxon signed rank: pT BC,AMT C <0.01) and 28.7%±12.7 (Friedman: p <0.005, Wilcoxon signed rank: pT BC,AMT C <0.003) decrease in the total oxygen uptake, respectively. The total mean absolute interaction torque is similarly illustrated for the participants in Fig. 3B. AMTC has the lowest interaction torque compared to TBC and HTC, indicating the least disagreement between the exoskeleton assistance and the user desired motion. With respect to the TBC, AMTC shows 17.1±12.5%, 12±15%, and 9.2±7.7% of reduction in human-exoskeleton total interaction in ultra-slow, slow, and moderate-speed walking, respectively. The difference is statistically significant at the ultra-slow walking (Friedman: p <0.04, Wilcoxon signed rank: pT BC,AMT C <0.01). Compared to HTC, AMTC shows 19.8±21.1%, 17.9±10.1%, and 18.1±9.9% reduction in human-exoskeleton total interaction. These differences are statistically significant in the case of slow (Fridman: p <0.03, Wilcoxon signed rank: pHT C,AMT C <0.004) and moderate-speed (Fridman: p <0.0008, Wilcoxon signed rank: pHT C,AMT C <0.004) walking. Fig. 3C shows the total muscle effort for participants’ right legs during ultraslow, slow, and moderate-speed walking across the three different controllers. Natural walking without the exoskeleton has the lowest total muscle effort compared to other cases in which the exoskeleton is involved. This is expected as wearing the exoskeleton adds about 17 kg of extra weight to the body resulting in higher muscle effort. Among the three controllers, TBC has the highest total muscular effort at all speeds. AMTC and HTC’s total muscular effort are close in all cases while AMTC is slightly lower and higher in ultra-slow and moderate speeds, respectively. None of the identified differences are statistically significant.
2.3 Interaction Portrait Analysis




2.4 Individual Adaptation Strategy








{kind=link}