Authors:
(1) Mohammad Shushtari, Department of Mechanical and Mechatronics Engineering, University of Waterloo ([email protected]);
(2) Julia Foellmer, Mechanics and Ocean Engineering Department, Hamburg University of Technology ([email protected]);
(3) Sanjay Krishna Gouda, Department of Mechanical and Mechatronics Engineering, University of Waterloo and Toronto Rehabilitation Institute (KITE), University Health Network ([email protected]).
Table of Links
Abstract and 1 Introduction
2 Results
2.1 Initial Processed Data for a Representative Participant
2.2 Overall Performance Analysis
2.3 Interaction Portrait Analysis
2.4 Individual Adaptation Strategy
3 Discussion
3.1 Human Adaptation
3.2 Importance of IP Analysis
4 Conclusion
5 Methods
5.1 Feedforward Control Strategies
5.2 Experimental Setup
5.3 Experimental Protocol
5.4 Data Analysis
Declarations
Appendix A Complementary Example Data
Appendix B Comparison with Natural Walking
References
3.1 Human Adaptation
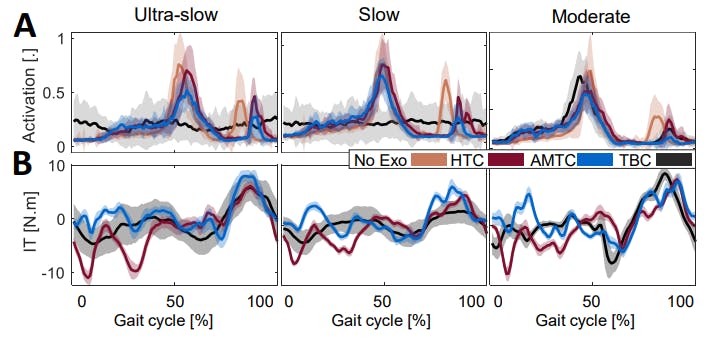
An interesting observation in Fig. 2 is the variation in metrics associated with the TBC controller. For instance, Participant #1 experienced varying interaction torques at ultra-slow and slow walking speeds, as shown in Fig. 2A. Conversely, at moderate speed walking, the variation in the interaction torque decreases, demonstrating a more


consistent performance by the participant. A similar observation is evident in the case of GM muscle activation (Fig. 2B). For further investigation, Fig. 6 illustrates the average profile of GM activation and hip interaction torque, temporally normalized with respect to the gait phase at ultra-slow, slow, and moderate-speed walking. Both metrics exhibit a large standard deviation (shaded area) during ultra-slow and slow walking, while the standard deviation significantly drops during moderate-speed walking. This indicates an inconsistency in the participant’s performance in both spatial and temporal aspects.
The inherent difference between the TBC and the other two controllers can explain this observation. During the TBC block, the feedforward torque is generated regardless of the user’s performance, and the exoskeleton has no capacity for adapting to the user. Therefore, it is entirely up to the user to adapt to the torque delivered by the exoskeleton. In ultra-slow and slow walking, the participant was unable to adjust their gait timing to the exoskeleton, resulting in inconsistent interaction with the exoskeleton. At the higher speed, however, the user was able to synchronize their gait with the exoskeleton assistance and, therefore, adopted a solid interaction strategy, which emerges as a lower variation in all the above metrics. This has not been the case for all participants, as six of them were not successful in effectively synchronizing their walking to the TBC-controlled exoskeleton assistance at any speed. These results highlight the importance of human-robot co-adaptation, which is not achievable with a time-based controller.




{kind=link}