Authors:
(1) Mohammad Shushtari, Department of Mechanical and Mechatronics Engineering, University of Waterloo ([email protected]);
(2) Julia Foellmer, Mechanics and Ocean Engineering Department, Hamburg University of Technology ([email protected]);
(3) Sanjay Krishna Gouda, Department of Mechanical and Mechatronics Engineering, University of Waterloo and Toronto Rehabilitation Institute (KITE), University Health Network ([email protected]).
Table of Links
Abstract and 1 Introduction
2 Results
2.1 Initial Processed Data for a Representative Participant
2.2 Overall Performance Analysis
2.3 Interaction Portrait Analysis
2.4 Individual Adaptation Strategy
3 Discussion
3.1 Human Adaptation
3.2 Importance of IP Analysis
4 Conclusion
5 Methods
5.1 Feedforward Control Strategies
5.2 Experimental Setup
5.3 Experimental Protocol
5.4 Data Analysis
Declarations
Appendix A Complementary Example Data
Appendix B Comparison with Natural Walking
References
3.2 Importance of IP Analysis
In Fig. 3A, the lower total muscular effort during walking with the HTC and AMTC compared to TBC is consistent with their lower metabolic rate with respect to the TBC, indicating that both controllers reduce the walking effort more than the TBCcontrolled exoskeleton. However, a similar trend has not been observed in the total interaction torque, where HTC resulted in higher interaction torque compared to the


TBC. This indicates that even though HTC and AMTC both reduced users’ metabolic rate and muscular effort, they encouraged users to adopt two different interaction strategies. IP analysis further investigates the effect of each controller on the performance of each participant by analyzing the difference in total muscular effort with respect to the difference in total human-exoskeleton interaction torque. Fig. 4 reveals that the decrease in metabolic rate occurred based on two different human adaptation strategies. In the HTC controller, users relinquished control to the exoskeleton, passively following the exoskeleton’s motion. In contrast, AMTC encouraged users to lead the motion more actively. Our IP analysis suggests that the HTC controller is particularly well-suited for applications requiring power augmentation, such as in industrial settings for workers or healthcare environments for nurses. In these contexts, the primary goal is to minimize human exertion, thereby enhancing operational capabilities and safety. Conversely, the AMTC controller shows greater promise in rehabilitation contexts for individuals with residual motor functions, such as those with incomplete spinal cord injuries or post-stroke conditions. Here, the imperative is to actively involve the user in task execution, thereby amplifying their motor functions and accelerating recovery processes.
Fig. 4 also demonstrates that different participants adopted a more consistent strategy with AMTC compared to the HTC, as the average IP vectors across participants exhibit lower variation with AMTC compared to the HTC controller.
IP distribution itself can also shed light on the strength of the adopted strategy in each participant depending on the radius of the vectors forming the IP. This is more evident in Fig. 5 where each point of IP represents the difference in muscle effort and interaction torque obtained for each stride. As an example, the IP analysis in Fig. 5 reveals that Participant #3 (2nd row, 2nd column) and Participant #6 (2nd row, first column) adopted the same interaction strategy with the AMTC controller compared to the TBC. This is, nevertheless, more significant for Participant #6 due to the larger radius of the distributed points compared to those of Participant #3.
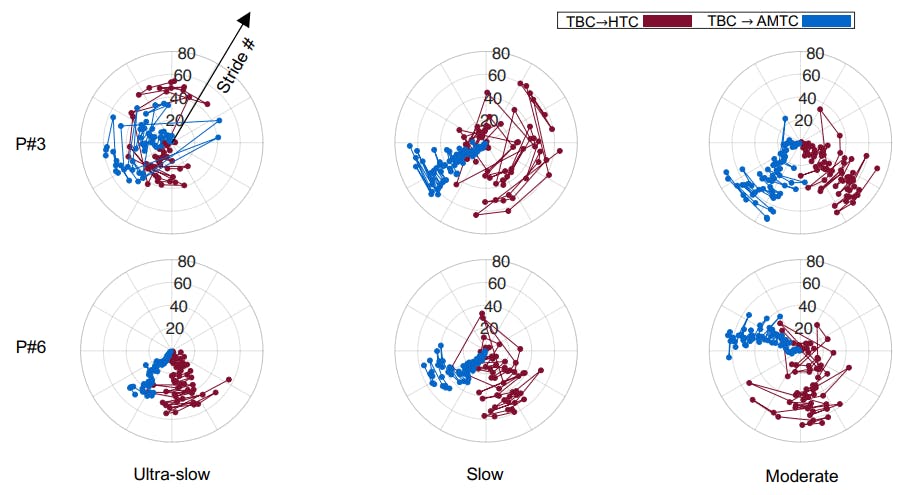
Using the IP analysis, it is also possible to track the evolution of the adopted strategy across the stride at each walking speed. Fig. 7, as an example, shows the evolution of the IP phase for each of the TBC→HTC and TBC→AMTC comparisons for participants #3 and #6, respectively. Implied by the large variation in the IP phase, Participant #3 did not converge to a consistent interaction strategy with neither the HTC nor AMTC controllers during ultra-slow walking. This lack of convergence to a consistent interaction with the exoskeleton agrees with our difficulty in maintaining smoothness and continuity of ultra-slow movements, possibly explained by limitations of dynamic primitives that often lead to segmented movements (Park, et al., 2017). In slow walking, however, the user adopted a more consistent strategy using AMTC, evidenced by low variations in the IP phase. In the case of the HTC controller, the participant’s strategy remains inconsistent. Only in the case of moderate-speed walking was Participant #3 able to converge to consistent interaction strategies both with the AMTC and the HTC controllers. Our IP analysis in this case shows that AMTC decreased the human-exoskeleton interaction, but the user did not completely obtain the motion control or yield the motion to the exoskeleton, as the IP phase is still in the third quadrant. In thecase of the HTC controller, the user has relied more on the exoskeleton assistance since the IP phase is primarily concentrated in the 4th quadrant. Participant #6, in contrast to Participant #3, converged to a consistent interaction with the exoskeleton at all three walking speeds. The HTC controller, regardless of the walking speed, has guided the participant to rely more on the exoskeleton as the IP phase is mostly concentrated on the border of the 3rd and 4th quadrants. In the case of the AMTC controller, however, we observe that as the gait speed increases, the user strategy develops more toward leading the gait and contributing to motion control, evidenced by an 83-degree shift in the average IP phase in moderate-speed walking compared to ultra-slow walking.
These results showcased the ability of IP analysis to provide an objective comparison of different exoskeleton controllers, the adopted interaction strategy by the user, as well as evaluating user-exoskeleton co-adaptation. Besides offline analysis, IP provides designers with a quantitative metric that can be tuned in a human-in-the-loop optimization setting to tailor the exoskeleton controller to the unique requirements of each application or participant.







{kind=link}