
Why migrating from YOLO to Grounding DINO was a total grind against CPU caches — and why the “Magic Optimization” button is a lie
In my previous post (Python is a Video Latency Suicide Note: How I Hit 29 FPS with Zero-Copy C++ ONNX), I detailed how I murdered the Global Interpreter Lock. By mapping hardware Luma (Y) natively into a Zero-Copy C++ pipeline, I drove YOLOv8 to a blistering 29+ FPS on a standard CPU.
I had built a Ferrari: fast, lock-free, and ruthless.
But then the mission changed. YOLOv8 is great if you want to detect cars and people. But what if you need to detect “a man holding a suspiciously shaped green briefcase”?
Enter Grounding DINO — an open-set object detector that marries Vision Transformers (ViT) with BERT-style text tokenization. It is incredibly powerful, but it is an absolute beast when it comes to memory paradigms.
If YOLOv8 in C++ was a straightforward sprint, integrating Grounding DINO into a multi-threaded C++ engine was an all-out engineering grind. Here is the post-mortem of how I survived the Transformer Latency Tar Pit, handled thread thrashing, and learned why aggressive ONNX optimizations will occasionally blow your CPU’s head off.
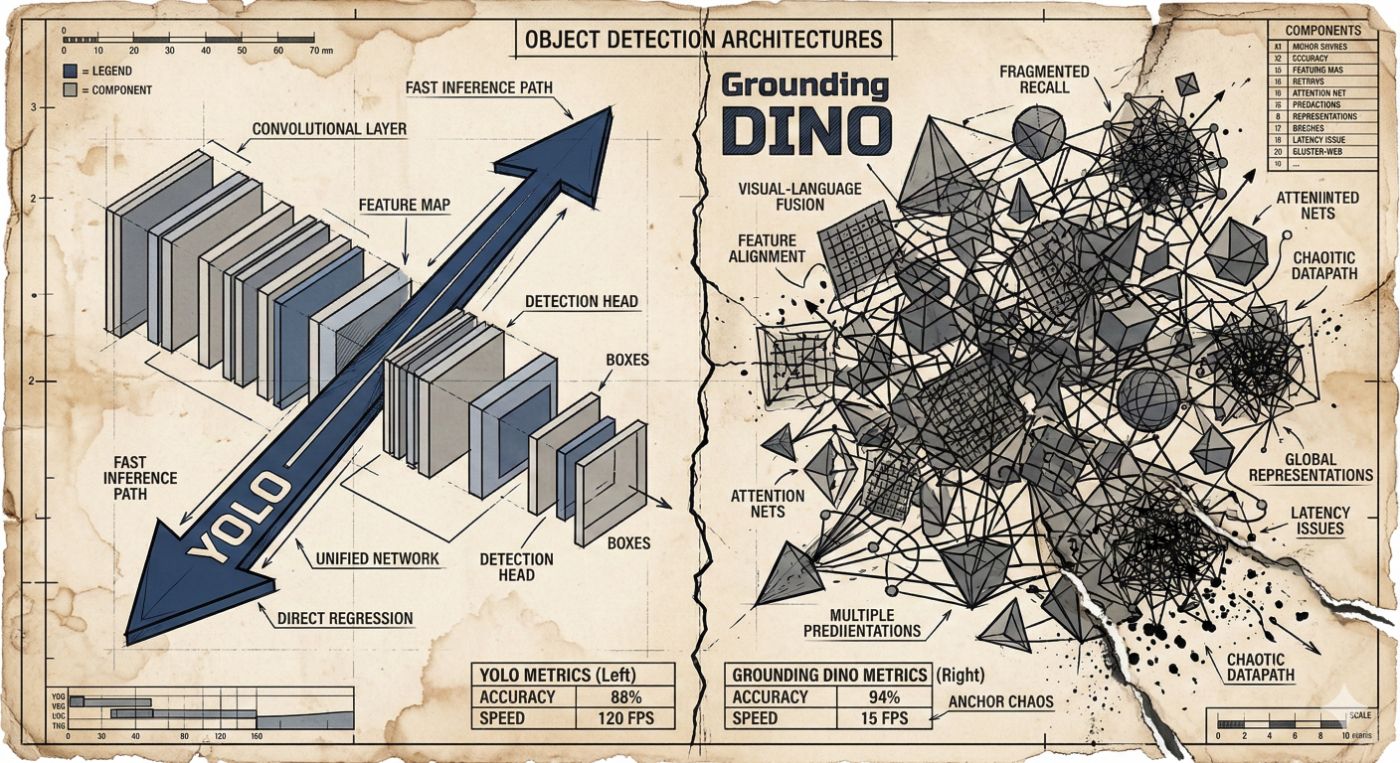
The Architecture Shock: YOLO vs. DINO
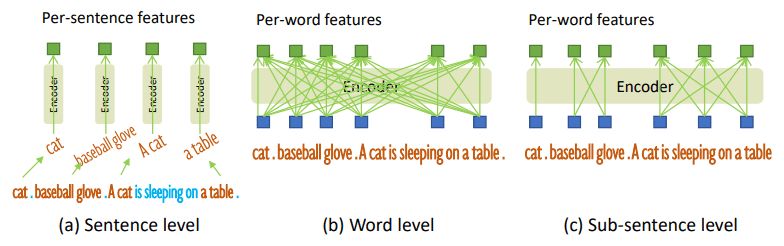
YOLOv8 is a predictable guest. You hand it pixels, it multiplies some matrices, and it hands you a bounding box. Grounding DINO is a different breed. It demands dual-modality tokenization. I had to port HuggingFace’s BERT tokenizer logic natively into strict C++, mapping text strings into attention_masks and token_type_ids to pass alongside the image tensor.
But the real challenge wasn’t the string parsing. It was the Vision Transformer’s Self-Attention mechanisms.
The 100-Thread Apocalypse
With YOLO, I scaled throughput by allocating a massive pool of std::thread workers, each restricted to 1 IntraOp thread. YOLO’s matrices are relatively small, so this mapped perfectly to the CPU cache.
I tried the same scaling for Grounding DINO: 10 workers, 1 thread each. I hit make, launched the binary, and the system crawled.
My Time-To-Inference (TTI) skyrocketed from 43ms to a soul-crushing 27,442.9ms. My throughput? 0.35 FPS.
=== Video Processing Metrics ===
Hardware Concurrency: 20 Cores
Inference Workers: 10 Threads
IntraOp Threads/Worker: 1
Average FPS: 0.359084
What happened? Transformer Memory Starvation. Grounding DINO’s multi-head self-attention requires massive blocks of continuous cache memory. Juggling 10 separate parallel Transformer instances with 1 thread each is a recipe for Cache Thrashing.
The Fix: I abandoned the YOLO scaling logic. I restricted the parallel queue workers and explicitly fed the individual Transformer engines enough threads to saturate the L3 cache without destroying it.
// RESTRICT the workers, EMPOWER the engine
numInferenceThreads = 2; // Only two parallel tasks
int intraOpThreads = 10; // Let each task breathe
int optimalDinoThreads = 5; // The L3 cache "sweet spot"
sessionOptions.SetIntraOpNumThreads(std::min(intraOpThreads, optimalDinoThreads));
sessionOptions.SetInterOpNumThreads(1);
Latencies plummeted from 27 seconds down to ~6 seconds. Still heavy, but we’re talking about a massive multi-modal ViT running completely natively on a CPU!
The “Aggressive Optimization” Death Trap
Once the threading was stable, I went looking for more speed. I set the ONNX Runtime to GraphOptimizationLevel::ORT_ENABLE_ALL and enabled CPU Memory Arenas (EnableCpuMemArena()).
The theory: ONNX would fuse operators and rewrite memory patterns to squeeze every drop of blood out of the CPU.
The Reality: The pipeline instantly detonated. [E:onnxruntime: ExecuteKernel] Non-zero status code returned while running ScatterND node. invalid indice found, indice = 4500717323110695567 Aborted (core dumped)
The Hard Lesson: Grounding DINO relies on complex PyTorch layout operations like ScatterND. At “Level 3” optimization, the execution provider aggressively converts memory formats (NCHW to NHWC) to fit cache lines. On complex Transformer topologies, this corrupted the memory pointers, and the engine blew its own head off.
Rule of Thumb: Sometimes, the “Magic Faster Button” is a trap. I retreated to ORT_ENABLE_BASIC.
The INT8 Salvation (And the Layout Catch)
If layout fusion was a bust, I had to attack the mathematical precision. I shifted to Dynamic INT8 Quantization. By crunching the dense MatMul and Add nodes down to 8-bit integers, I attained a raw 24% latency speedup.

But here is the final “Boss Fight” catch: If I enabled ORT_ENABLE_ALL on the INT8 model, the TTI latency actually doubled from 4.6s to 11.4s!
Why? Layout Thrashing.
Converting quantized matrices back and forth to satisfy “optimized” cache lines creates more overhead than the math itself. With INT8 models, less is more. Sticking to ORT_ENABLE_BASIC kept the 24% quantized speedup intact.
The Takeaway: Validation for FogAI
This repository (video-yolo-dash-processor) isn’t just a toy. It is the FogAI Sandbox.
I use this “стенд” (testbed) to rigorously stress-test models and optimization patterns before promoting them to the FogAI Core. If a strategy can’t survive here at 29 FPS, it has no business in an industrial autonomous nervous system.
- Choke the threads: Restrict internal node thrashing if you scale your workers explicitly.
- Beware Level 3 Graph Fusion: It will cannibalize your Transformer mappings.
- Quantize the Math: INT8 dominates the CPU.
Keep the metal to the floor, and never let Python anywhere near your video pipeline again.
Previous Chapters in the FogAI Saga:
- The Manifesto: Prompts Are Overrated. Here’s How I Built a Zero-Copy Fog AI Node Without Python
- The Career Story: Prompts Are Overrated: I Built a Zero-Copy Fog AI Node Without Python (And It Hurt)
- Stories from the Sandbox: Python is a Video Latency Suicide Note: How I Hit 29 FPS with Zero-Copy C++ ONNX
- The Sandbox: GitHub: NickZt/video-yolo-dash-processor
- The System: GitHub: NickZt/FogAi
The Path Forward: From Reflexes to Reasoning
We’ve survived the JNI memory traps and the Transformer cache grind. The “Hamster” (OrangePi with Rockchip) now has its reflexes — low-latency, deterministic, and local. But a nervous system is useless without a brain to give it context.
In the next chapter, the Cat enters the Fog.
I’m moving beyond the sandbox to test the ultimate hybrid: orchestrating a high-performance x86 workstation with our ARM-based edge cluster. We are building a Distributed Tactical Decision Support System where the Hamster reacts in microseconds, and the Cat reasons in multimodal depth.
It’s time to see if a workstation and a single-board computer can stay synchronized when the network gets noisy. Stay tuned for the “Reflex-Reasoning” sync post-mortem.







{kind=link}